






















































The History and Operational Principle of Strain Wave Gear
May 11, 2022
The History of strain wave gear
The strain wave gear was invented by Walton Musser in 1957. It was firstly applied in the electrically-driven wheels of Apollo Lunar Rover. Through 60 years development, now in various applications in high level industry.
The Operational Principle of Strain Wave Gear
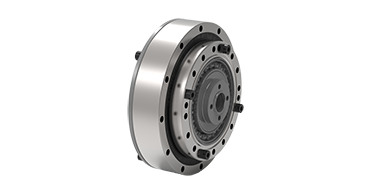
The flex-spline is slightly smaller in diameter than the circular-spline resulting in it having two fewer teeth on its outer circumference. It is held in an elliptical shape by the wave-generator and its teeth engage with the teeth of the circular-spline across the major axis of the ellipse.
When the wave-generator starts to rotate clockwise, the zone of tooth engagement travels with the major elliptical axis. When the wave-generator has turned through 180 degrees clockwise the flex-spline has regressed by one tooth relative to the circular-spline.
As its unique operational principle applying elastodynamics of metals, the strain wave gear tooth behavior can achieve free backlash motion and high positioning repeat-ability. More than 30% of all teeth engages in two locations in 180 degree symmetry to reach high efficiency and high torque capability.

Previous Post
Strain Wave Gear for Multi-Axis Robot Power Unit